Mapping & SLAM¶
Mapping¶
Computer vision and cartography
Goal for an autonomous robot is to be able to construct (and/or use) a map/floor plan and to localize itself and its recharging bases.
SLAM¶
Simultaneous Localization and Mapping
Method for autonomous vehicles that enables building a map and localization of vehicle in that map at the same time.
Allow vehicle to map out unknown environments
flowchart LR
sd[/Sensor<br/>Data/] --> fe --> be --> pose[Pose Graph <br/>& Map Information]
subgraph fe["Frontend<br/>(Sensor-Dependent)"]
direction LR
me["Motion<br/>Estimation"]
ole["Obstacle<br/>Location<br/>Estimation"]
end
subgraph be["Backend<br/>(Sensor-Independent)"]
direction LR
rpg["Register<br/>Pose Graphs"]
go[Graph<br/>Optimization]
end| Localization | Mapping | SLAM | |
|---|---|---|---|
| given | Map | object’s trajectory (position at each time) | |
| Use sensor data to | estimate current position of object | map | Build map and estimate trajectory |
 |  |  |
Need for Map¶
- Path planning
- Limiting error in state estimates, by providing opportunity to ‘reset’
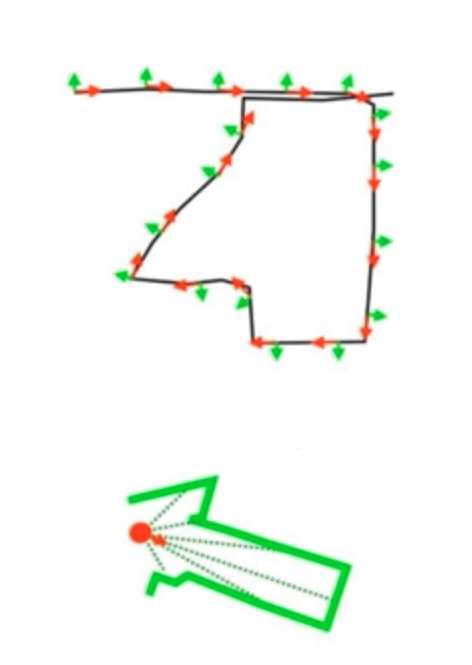
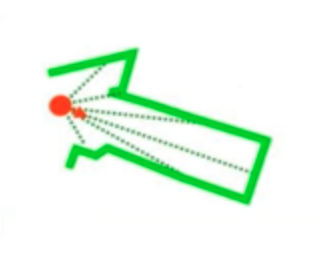
2D Graph SLAM¶
Considering uncertainty in \(x\) and \(y\), gaussian functions are applied to maximize probability of product $$ \mu = \Omega^{-1} \epsilon $$ where
- \(\mu =\) locations of landmarks and robot positions
- \(\Omega=\) matrix of \(X\) and landmarks
- \(\epsilon=\) vector of constraints
Constraints¶
- Initial constraint
- Relative motion constraint
- Relative measurement constraint