Path Planning¶
Goal is to plan a collision-free route from a starting point to a target point
Find a path between 2 locations in an environment, regardless of the level of knowledge about it.
Computational problem to find a sequence of valid configurations that move object from source to destination
Algorithms¶
- A*
- Dijkstra
- GVD (Generalized Moroni Diagrams)
- RRT (Rapidly Exploring Random Tree)
Local <-> Global Frame¶
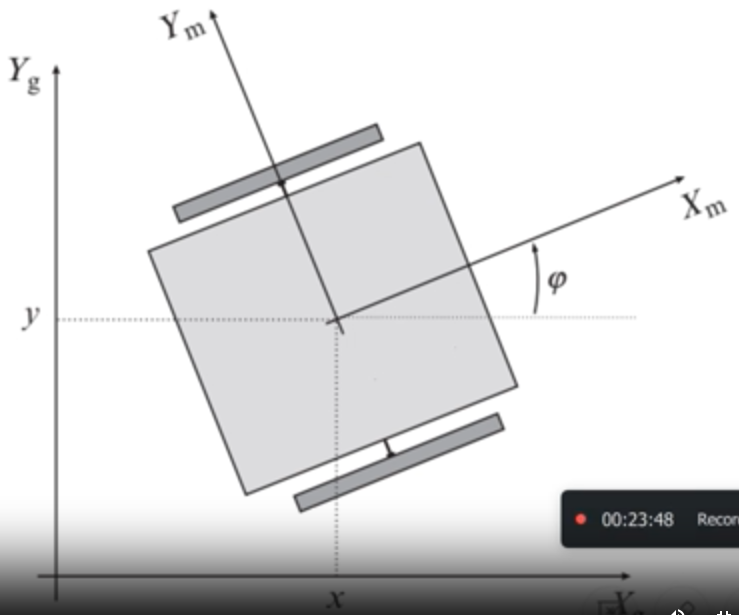
If robot position in a plane is defined by its state vector (location and orientation) is defined by $$ q(t) = \begin{bmatrix} x(t) \ y(t) \ \theta(t) \end{bmatrix} $$ Transformation between local frame \(m\) and global frame \(g\) $$ R(\theta) = \begin{bmatrix} \cos \theta & \sin \theta & 0 \ - \sin \theta & \cos \theta & 0 \ 0 & 0 & 1 \end{bmatrix} $$
Direct/Forward Kinematics¶
Determination of robot position for given control variables
Odometry/Dead Reckoning¶
Obtaining through integration of kinematic model $$ \begin{aligned} x(t) &= \int_0^t v(t) \cdot \cos \theta(t) \cdot dt \ y(t) &= \int_0^t v(t) \cdot \sin \theta(t) \cdot dt \ \theta(t) &= \int_0^t w(t) \cdot dt \end{aligned} $$
### Euler Method
Control¶
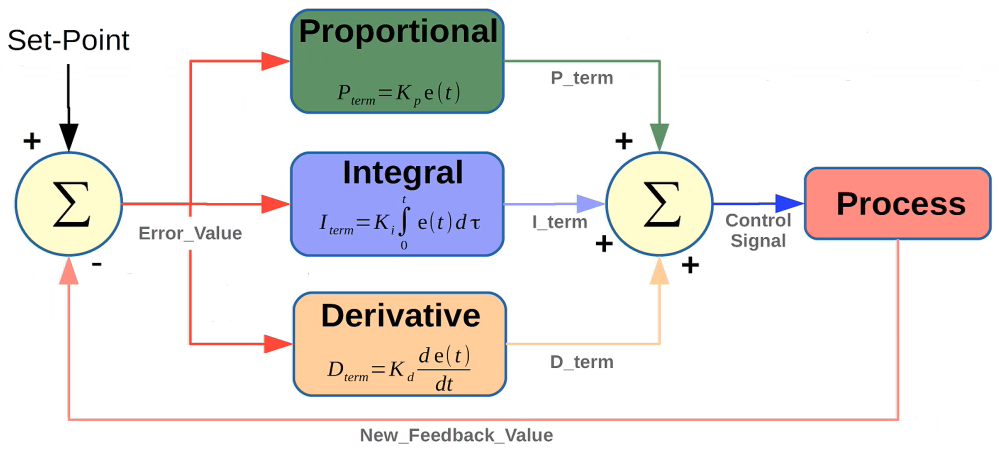 $$ u(t) = k_p e(t) + k_i \int_0^t e(\tau) d \tau + k_d \dfrac{d}{dt} e(t) $$ where \(e=\) error
$$ u(t) = k_p e(t) + k_i \int_0^t e(\tau) d \tau + k_d \dfrac{d}{dt} e(t) $$ where \(e=\) error
Path Planning Algorithms¶
Single-Course Shortest Path problem¶
Finding shortest path from a source to all other vertices in the graph
Dijkstra’s algorithm